Der wesentliche Vorteil der Steuerung des Traincontrollers ist das punktgenaue Anhalten von Loks. Dies wird durch das Einmessen der Loks erreicht, wobei ein Profil über die einzelnen Fahrstufen erstellt wird.
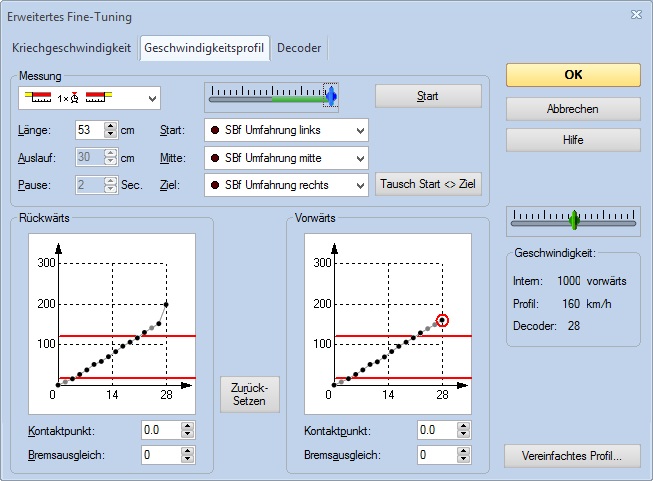
Als erster Schritt ist die Begrenzung der Höchstgeschwindigkeit der Lok vorzunehmen. Dazu wird die Höchstgeschwindigkeit auf einer Messstrecke ermittelt und dann über die Programmierung des Lok-Decoders über die Digitalzentrale angepasst, bis die maximale Geschwindigkeit der Lok der gewünschten Maximalgeschwindigkeit entspricht. Auf meiner Anlage begrenze ich auf 120 km/h. Das wirkt noch ganz realistisch bei der recht kurzen Paradestrecke.
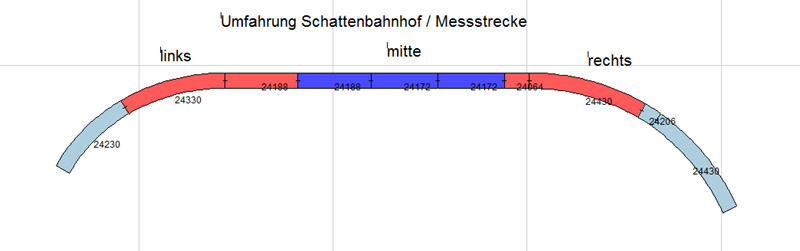
Vor der Messung steht die Einrichtung der Messtrecke: Ich habe dazu drei Belegtmelder in das Umfahrgleis des Schattenbahnhofs eingebaut. Entscheidend ist die mittlere Strecke für die Messung, für die eine Mindestlänge von 100 cm empfohlen wird. In Wolkingen ist diese aber nur 53 cm lang und liefert auch sehr brauchbare Ergebnisse.
Messung der Höchstgeschwindigkeit
Im dargestellten Dialog werden die drei Rück- bzw. Belegtmelder angegeben und die Länge des mittleren Messabschnitts.
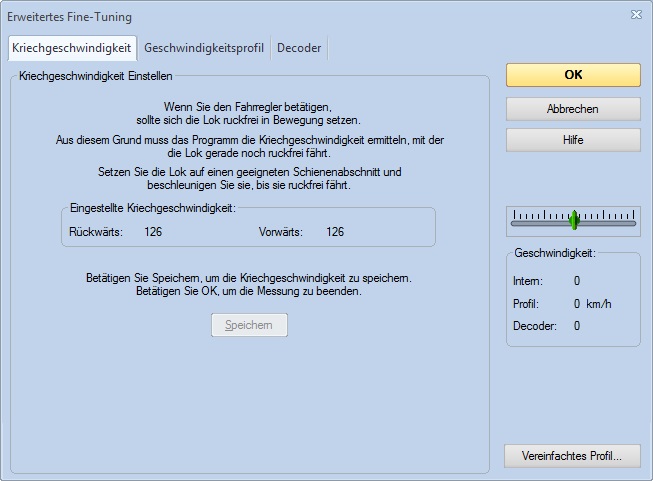
Festlegung der Kriechgeschwindigkeit
Nach der oberen Grenze des Einmessen wird die untere Grenze, die Kriechgeschwindigkeit, festgelegt. Ich habe einen relativ hohen Wert festgelegt, um zu verhindern, dass die Lok bei zu geringer Geschwindigkeit wg. Dreck auf den Schienen ungewollt stehen bleibt.
Das Einmessen des Geschwindigkeitsprofils
Und dann kommt der Einmessvorgang, der vollautomatisch die Lok über eine Menge von Fahrstufen vor und zurück über die Strecke schickt. Heraus kommt das Geschwindigkeitsprofil, das meist einen linearen Verlauf zeigt.
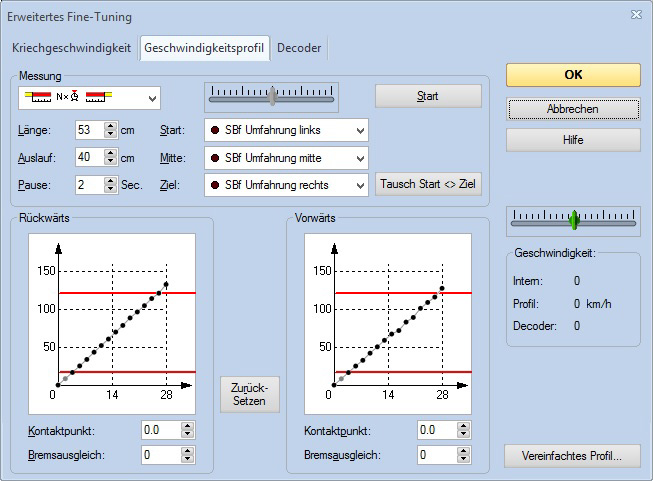
Das derartige Einmessen ist schon ein wenig aufwändig, lohnt sich aber absolut, weil die Lok nun ab dem Bremspunkt vollautomatisch bis zum Haltepunkt sauber abgebremst werden kann!